#include <Rotation.h>
Inheritance diagram for O_SESSAME::Quaternion:
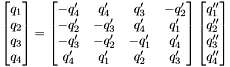
The 4-element quaternion set,  contains no singularities similar to those found in an Euler angle set. The quaternion,
contains no singularities similar to those found in an Euler angle set. The quaternion,  , can be determined from the Euler-axis parameters set (
, can be determined from the Euler-axis parameters set ( ,
,  ) as follows:
) as follows:


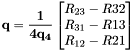
The quaternion representation has the useful characteristic that it should have unit length. Therefore, the quaternion can be normalized during computations to help accuracy,  . Also, the quaternion is not unique, but can also equal its negative
. Also, the quaternion is not unique, but can also equal its negative  .
.
Definition at line 301 of file Rotation.h.
Public Member Functions | |
| Quaternion () | |
| Create a quaternion with initial value of [0,0,0,1]^T. | |
| Quaternion (double _q1, double _q2, double _q3, double _q4) | |
| Create a quaternion with initial values; will be normalized to a unit quaternion automatically. | |
| Quaternion (const Vector &_qVector) | |
| Create a quaternion with initial value of the input 4x1 matrix. Create a quaternion with initial value of the input 4x1 vector; will be normalized to a unit quaternion automatically. | |
| Quaternion (const DirectionCosineMatrix &_DCM) | |
| Create a quaternion from a direction cosine matrix (DCM). | |
| Quaternion (const Vector &_EulerAngles, const int &_Sequence) | |
| Create a quaternion from a set of Euler Angles and Sequence. | |
| Quaternion (const Vector &_EulerAxis, const Angle &_EulerAngle) | |
| Create a quaternion from the transformation about an Euler Axis by a set angle. | |
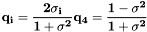
| Quaternion (const ModifiedRodriguezParameters &_MRP) | |
| Create a Quaternion from the transformation of Modified Rodriguez Paramaters (MRP). | |
| void | Set (const Quaternion &_qIn) |
| Set the quaternion to a copy of another quaternion. | |
| void | Set (double _q1, double _q2, double _q3, double _q4) |
| Sets the quaternion to the values specified. | |
| void | Set (const Vector &_qVector) |
| Sets the quaternion with the values of the input 4x1 matrix. Sets the quaternion with the values of the input 4x1 vector. | |
| void | Set (const DirectionCosineMatrix &_DCM) |
| Sets the current quaternion from a converted Direction Cosine Matrix (DCM). | |
| void | Set (const Vector &_EulerAngles, const int &_Sequence) |
| Set the quaternion to the transformation of set of Euler Angles. | |
| void | Set (const Vector &_EulerAxis, const Angle &_EulerAngle) |
| Set the quaternion to the transformation about an Euler Axis by a set angle. | |
| void | Set (const ModifiedRodriguezParameters &_MRP) |
| Set the Quaternion to the transformation of Modified Rodriguez Paramaters (MRP). | |
| DirectionCosineMatrix | GetDCM () const |
| Convert the quaternion to a Direction Cosine Matrix (DCM). Uses the DirectionCosineMatrix(Quaternion) constructor. | |
| Vector | GetEulerAngles (const int &_Sequence) const |
| Convert the quaternion to a set of Euler Angles. | |
| Vector | GetEulerAxisAngle (Vector &_EulerAxis, Angle &_EulerAngle) const |
| Convert the quaternion to an Euler Axis and Angle. | |
| Vector | GetEulerAxisAngle () const |
| Convert the quaternion to an Euler Axis and Angle. | |
| ModifiedRodriguezParameters | GetMRP () const |
| Convert the quaternion to an MRP representation. Uses the ModifiedRodriguezParameters(Quaternion) constructor. | |
| void | Normalize () |
| Quaternion | operator+ (const Quaternion &_quat2) const |
| Determine the successive rotation from the summation of two quaternions. | |
| Quaternion | operator- (const Quaternion &_quat2) const |
| Determine the relative rotation from the difference of two quaternions. | |
| void | initialize () |
| void | initialize (const CAMdoubleVector &A) |
| void | initialize (const CAMvectorBase &A) |
| void | initialize (long n) |
| void | initialize (const CAMrange &R1) |
| void | initialize (int d_type) |
| void | initialize (int d_type, const CAMrange &R1) |
| double & | operator() (long i1) |
| const double & | operator() (long i1) const |
| CAMdoubleVector | operator() (const CAMrange &R1) |
| const CAMdoubleVector | operator() (const CAMrange &R1) const |
| double * | getDataPointer () const |
| void * | getDataPointer (long i1, long i2) const |
| CAMvectorBase | operator- () const |
| CAMvectorBase | operator- (const CAMvectorBase &A) const |
| CAMmatrixBase | operator- (const CAMmatrixBase &A) const |
| CAMvectorBase | operator- (const double value) const |
| CAMvectorBase | operator+ (const CAMvectorBase &A) const |
| CAMmatrixBase | operator+ (const CAMmatrixBase &A) const |
| CAMvectorBase | operator+ (const double value) const |
| CAMmatrixBase | operator * (const CAMvectorBase &A) const |
| CAMvectorBase | operator * (const CAMmatrixBase &A) const |
| CAMvectorBase | operator * (double value) const |
| void | operator+= (const CAMvectorBase &A) |
| void | operator+= (const CAMmatrixBase &A) |
| void | operator+= (const double value) |
| void | operator-= (const CAMvectorBase &A) |
| void | operator-= (const CAMmatrixBase &A) |
| void | operator-= (const double value) |
| CAMvectorBase | operator~ () const |
| CAMvectorBase | transpose () const |
| long | CAMvectorBase::getIndexBase () const |
| long | CAMvectorBase::getIndexBound () const |
| long | CAMvectorBase::getIndexStride () const |
| long | CAMvectorBase::getIndexCount () const |
| void | CAMvectorBase::setIndexBase (long i) |
| void | CAMvectorBase::setIndexStride (long i) |
| CAMvectorBase | operator/ (double value) const |
| void | operator *= (double value) |
| void | operator/= (double value) |
| void | setToValue (double value) |
| CAMvectorBase | plusValue (double value) |
| CAMvectorBase | minusValue (double value) |
| void | setTemporaryFlag () |
| void | initializeReturnArgument (const CAMstructureBase &S, int dataT) |
| void | initializeReturnArgument (const CAMvectorBase &A) |
| void | initializeMinDuplicate (const CAMvectorBase &A) |
| CAMmatrixBase | asMatrix () const |
| CAMarrayBase | asArray () const |
| long | getDimension () const |
| void | incrementReferenceCount () |
| void | decrementReferenceCount () |
| int | getReferenceCount () const |
| void | setReferenceCount (int refValue) |
| double | max () const |
| double | min () const |
| double | maxAbs () const |
| double | minAbs () const |
| double | infNorm () const |
| double | pNorm (int p) const |
| double | pNorm (long p) const |
| double | pNorm (float p) const |
| double | pNorm (double p) const |
| double | dot (const CAMvectorBase &V) const |
| void | exchangeContentsWith (CAMvectorBase &B) |
| void | initializeReferenceDuplicate (const CAMvectorBase &B) |
Static Public Member Functions | |
| void | referenceCountError () |
| void | indexCheck (const CAMstructureBase &S, long i1, long i2) |
| void | indexErrorMessage (long indexDimension, long base, long bound, long index) |
| void | nonConformingMessage (const CAMstructureBase &A, const CAMstructureBase &B) |
| void | doubleConversionError (const CAMstructureBase &A) |
| void | objectConversionError (const CAMstructureBase &A) |
| void | nullOperandError () |
| void | nullOperandError (char *Operation) |
| void | inputSizeError () |
Public Attributes | |
| CAMstructureBase | Structure |
| CAMdataHandler * | DataP |
| int | typeValue |
| int | referenceFlag |
| long | vectorBaseReferenceCount |
Friends | |
| class | CAMmatrixBase |
| __IMPEXP__ friend ostream & | operator<< (ostream &out_stream, const CAMvectorBase &A) |
| __IMPEXP__ friend istream & | operator>> (istream &in_stream, CAMvectorBase &A) |
| __IMPEXP__ friend CAMvectorBase | operator- (const double value, const CAMvectorBase &A) |
| __IMPEXP__ friend CAMvectorBase | operator+ (const double value, const CAMvectorBase &A) |
| __IMPEXP__ friend CAMvectorBase | operator * (double value, const CAMvectorBase &A) |
| __IMPEXP__ friend CAMvectorBase | operator/ (double value, const CAMvectorBase &A) |
|
|
Create a quaternion with initial value of [0,0,0,1]^T.
Definition at line 1048 of file Rotation.cpp. |
|
||||||||||||||||||||
|
Create a quaternion with initial values; will be normalized to a unit quaternion automatically.
Definition at line 1061 of file Rotation.cpp. |
|
|
Create a quaternion with initial value of the input 4x1 matrix. Create a quaternion with initial value of the input 4x1 vector; will be normalized to a unit quaternion automatically.
Definition at line 1082 of file Rotation.cpp. |
|
|
Create a quaternion from a direction cosine matrix (DCM).
Definition at line 1092 of file Rotation.cpp. |
|
||||||||||||
|
Create a quaternion from a set of Euler Angles and Sequence.
Definition at line 1101 of file Rotation.cpp. |
|
||||||||||||
|
Create a quaternion from the transformation about an Euler Axis by a set angle.
Definition at line 1111 of file Rotation.cpp. |
|
|
Create a Quaternion from the transformation of Modified Rodriguez Paramaters (MRP).
Definition at line 1119 of file Rotation.cpp. |
|
|
Set the quaternion to a copy of another quaternion.
Definition at line 1127 of file Rotation.cpp. |
|
||||||||||||||||||||
|
Sets the quaternion to the values specified.
Definition at line 1143 of file Rotation.cpp. |
|
|
Sets the quaternion with the values of the input 4x1 matrix. Sets the quaternion with the values of the input 4x1 vector.
Definition at line 1176 of file Rotation.cpp. |
|
|
Sets the current quaternion from a converted Direction Cosine Matrix (DCM).
Definition at line 1200 of file Rotation.cpp. |
|
||||||||||||
|
Set the quaternion to the transformation of set of Euler Angles.
Definition at line 1218 of file Rotation.cpp. |
|
||||||||||||
|
Set the quaternion to the transformation about an Euler Axis by a set angle.
Definition at line 1234 of file Rotation.cpp. |
|
|
Set the Quaternion to the transformation of Modified Rodriguez Paramaters (MRP).
Definition at line 1249 of file Rotation.cpp. |
|
|
Convert the quaternion to a Direction Cosine Matrix (DCM). Uses the DirectionCosineMatrix(Quaternion) constructor.
Definition at line 1266 of file Rotation.cpp. |
|
|
Convert the quaternion to a set of Euler Angles.
Definition at line 1275 of file Rotation.cpp. |
|
||||||||||||
|
Convert the quaternion to an Euler Axis and Angle.
Definition at line 1290 of file Rotation.cpp. |
|
|
Convert the quaternion to an Euler Axis and Angle.
Definition at line 1304 of file Rotation.cpp. |
|
|
Convert the quaternion to an MRP representation. Uses the ModifiedRodriguezParameters(Quaternion) constructor.
Definition at line 1316 of file Rotation.cpp. |
|
|
Definition at line 1324 of file Rotation.cpp. |
|
|
Determine the successive rotation from the summation of two quaternions.
Definition at line 1352 of file Rotation.cpp. |
|
|
Determine the relative rotation from the difference of two quaternions.
Definition at line 1397 of file Rotation.cpp. |
|
|
Reimplemented from CAMvectorBase. |
|
|
|
|
|
Reimplemented from CAMvectorBase. |
|
|
|
|
|
|
|
|
Definition at line 248 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 292 of file vecbse.cpp. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Reimplemented from CAMvectorBase. |
|
||||||||||||
|
Definition at line 1132 of file vecbse.cpp. |
|
|
Definition at line 378 of file vecbse.cpp. |
|
|
Definition at line 424 of file vecbse.cpp. |
|
|
Definition at line 440 of file vecbse.cpp. |
|
|
Definition at line 867 of file vecbse.cpp. |
|
|
Definition at line 391 of file vecbse.cpp. |
|
|
Definition at line 408 of file vecbse.cpp. |
|
|
Definition at line 836 of file vecbse.cpp. |
|
|
Definition at line 457 of file vecbse.cpp. |
|
|
Definition at line 550 of file vecbse.cpp. |
|
|
Definition at line 923 of file vecbse.cpp. |
|
|
Definition at line 650 of file vecbse.cpp. |
|
|
Definition at line 666 of file vecbse.cpp. |
|
|
Definition at line 899 of file vecbse.cpp. |
|
|
Definition at line 676 of file vecbse.cpp. |
|
|
Definition at line 686 of file vecbse.cpp. |
|
|
Definition at line 911 of file vecbse.cpp. |
|
|
Definition at line 807 of file vecbse.cpp. |
|
|
Definition at line 697 of file vecbse.cpp. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Definition at line 945 of file vecbse.cpp. |
|
|
Definition at line 967 of file vecbse.cpp. |
|
|
Definition at line 975 of file vecbse.cpp. |
|
|
Definition at line 982 of file vecbse.cpp. |
|
|
Definition at line 990 of file vecbse.cpp. |
|
|
Definition at line 1001 of file vecbse.cpp. |
|
|
|
|
||||||||||||
|
Definition at line 322 of file vecbse.cpp. |
|
|
Definition at line 316 of file vecbse.cpp. |
|
|
Definition at line 328 of file vecbse.cpp. |
|
|
Definition at line 1080 of file vecbse.cpp. |
|
|
Definition at line 1106 of file vecbse.cpp. |
|
|
|
|
|
Definition at line 1154 of file vecbse.cpp. |
|
|
|
|
|
|
|
|
|
|
|
Definition at line 1160 of file vecbse.cpp. |
|
||||||||||||||||
|
Definition at line 1172 of file vecbse.cpp. |
|
||||||||||||||||||||
|
Definition at line 1197 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 1205 of file vecbse.cpp. |
|
|
Definition at line 1222 of file vecbse.cpp. |
|
|
Definition at line 1235 of file vecbse.cpp. |
|
|
Definition at line 1247 of file vecbse.cpp. |
|
|
Definition at line 1253 of file vecbse.cpp. |
|
|
Definition at line 1259 of file vecbse.cpp. |
|
|
Definition at line 13 of file vecutl.cpp. |
|
|
Definition at line 39 of file vecutl.cpp. |
|
|
Definition at line 65 of file vecutl.cpp. |
|
|
Definition at line 91 of file vecutl.cpp. |
|
|
Definition at line 118 of file vecutl.cpp. |
|
|
Definition at line 170 of file vecutl.cpp. |
|
|
Definition at line 171 of file vecutl.cpp. |
|
|
Definition at line 172 of file vecutl.cpp. |
|
|
Definition at line 144 of file vecutl.cpp. |
|
|
Definition at line 173 of file vecutl.cpp. |
|
|
Definition at line 1017 of file vecbse.cpp. |
|
|
Definition at line 1048 of file vecbse.cpp. |
|
|
|
|
||||||||||||
|
Definition at line 182 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 210 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 883 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 851 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 934 of file vecbse.cpp. |
|
||||||||||||
|
Definition at line 956 of file vecbse.cpp. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.3
1.3


 ).
).  )[rad].
)[rad]. 
 )[rad]
)[rad]
 and
and  (Ref Schaub99)
(Ref Schaub99)