#include <RungeKuttaIntegrator.h>
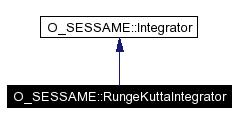
Inheritance diagram for O_SESSAME::RungeKuttaIntegrator:
This class defines the functions that are required for all Integrator types (ie
AdamsBashfourthIntegrator, etc).
 , where
, where  is the time (in seconds),
is the time (in seconds),  is the vector of states being integrated,
is the vector of states being integrated,  is a matrix of constants, and
is a matrix of constants, and  is a reference to an external function which can be used to evaluate other parameters necessary for the RHS equation. The integration strategy will then evaluate the function
is a reference to an external function which can be used to evaluate other parameters necessary for the RHS equation. The integration strategy will then evaluate the function  at various timesteps, depending on the integration algorithm, and combine the results together to approximate the integrated solution.
at various timesteps, depending on the integration algorithm, and combine the results together to approximate the integrated solution. :
: 
Definition at line 28 of file RungeKuttaIntegrator.h.
Public Member Functions | |
| RungeKuttaIntegrator () | |
| Creates a default, unitialized RK-integrator. | |
| Matrix | Integrate (const vector< ssfTime > &_propTime, odeFunctor _odeFunctorPtr, const Vector &_initialConditions, Orbit *_Orbit, Attitude *_Attitude, const Matrix &_constants, const Functor &_functorPtr) |
| Integrates the Right-Hand Side (RHS) equation using a Runge-Kutta 4th Order integrator. | |
| void | SetNumSteps (const int &_numSteps) |
| Set the number of integration steps. | |
| int | GetNumSteps () |
| Return the number of integration steps. | |
Private Attributes | |
| int | m_NumSteps |
| number of integration steps performed b/w every timestep | |
|
|
Creates a default, unitialized RK-integrator.
Definition at line 18 of file RungeKuttaIntegrator.cpp. |
|
||||||||||||||||||||||||||||||||
|
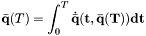
Integrates the Right-Hand Side (RHS) equation using a Runge-Kutta 4th Order integrator.
This function will integrate an equation of the form
Implements O_SESSAME::Integrator. Definition at line 107 of file RungeKuttaIntegrator.cpp. |
|
|
Set the number of integration steps.
Definition at line 41 of file RungeKuttaIntegrator.h. |
|
|
Return the number of integration steps.
Definition at line 46 of file RungeKuttaIntegrator.h. |
|
|
number of integration steps performed b/w every timestep
Definition at line 48 of file RungeKuttaIntegrator.h. |
 1.3
1.3
 from
from  to
to  given initial conditions, an orbit and attitude object (or empty references if not required), a matrix of constants, and an external call-back function.
given initial conditions, an orbit and attitude object (or empty references if not required), a matrix of constants, and an external call-back function.